Lab 8 - Stunts!
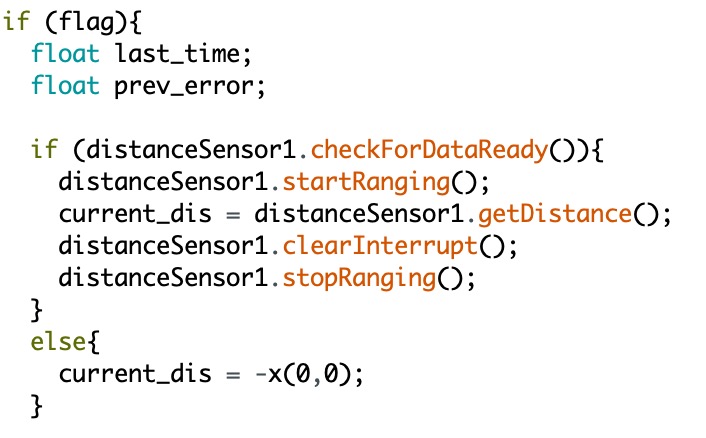
After implementing the Kalman filter into the Arduino code and robot, we could use that to predict the sensor distance in this lab. The code below shows that I made a if loop to determine when to use the real sensor value and when to use the predicted value, which will make the robot react much faster.
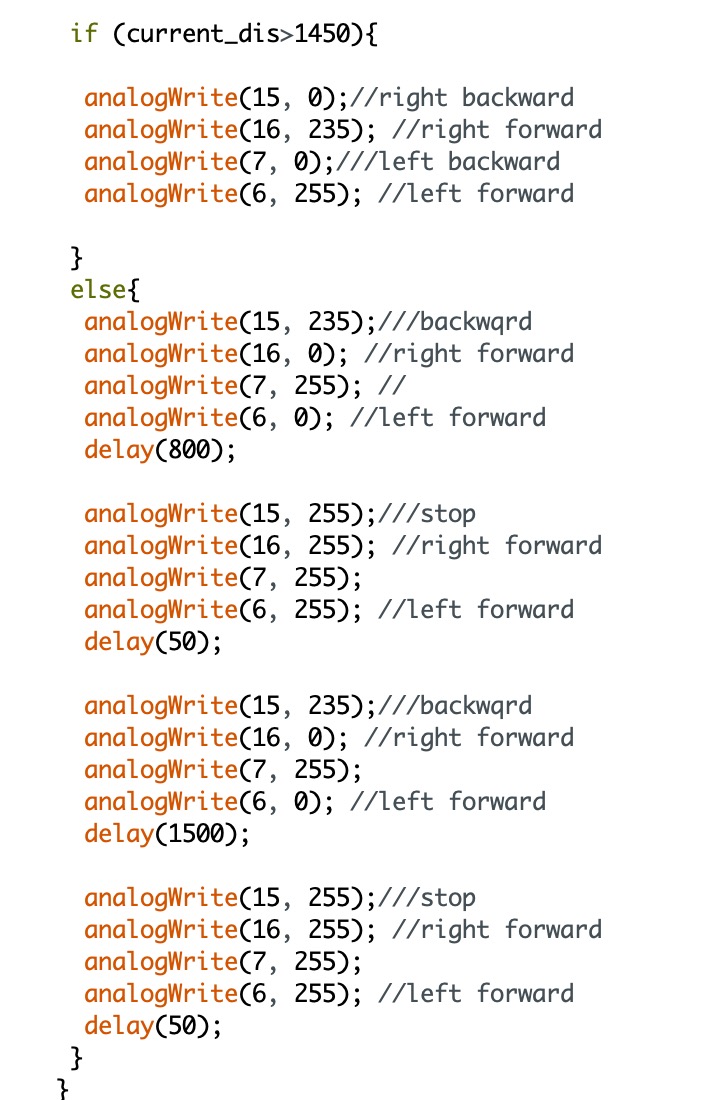
In the lab room, we should stop the robot right on the black pad to successfully do the flip. So, I have to change different distance value for stopping in the if loop below. I found 1450 is an appropriate one. The code below shows how I reach the goal of filpping in this lab.
The video shown below is an interesting run. The robot successfully flip on the black pad, but it just go straight to the outside of the classroom.
The video below is the successful run finished within 3s and come back to the original line. I do have a perfect one that go very straight to the wall and come back straight to the exact point of the starting point. Sadly, I forgot to record it.
Based on several tries, I realize there're many other surrounding factors that might have a huge influence on the performance of the robot, even though every run is using the same Arduino code.